Sơ Lược Cấu Tạo Cánh Tay Robot Công Nghiệp Cơ Bản

Trong bối cảnh nền công nghiệp 4.0 đang tác động mạnh mẽ đến mọi khâu sản xuất, việc hiểu rõ cấu tạo cánh tay robot công nghiệp không còn là kiến thức chuyên sâu dành riêng cho giới nghiên cứu, mà đã trở thành “chìa khóa” sống còn đối với các chủ doanh nghiệp và quản lý phân xưởng. Đặc biệt trong ngành công nghiệp ép phun và đùn thổi nhựa, nơi đòi hỏi chu kỳ hoạt động liên tục, độ chính xác tuyệt đối và môi trường làm việc khắc nghiệt (nhiệt độ cao, bụi bẩn, hóa chất), cánh tay robot chính là giải pháp thay thế hoàn hảo cho sức lao động truyền thống.
Bài viết này, được tổng hợp bởi các kỹ sư tự động hóa tại Trung Nguyên TNT – đơn vị với hơn 15 năm kinh nghiệm chuyển giao công nghệ Đài Loan tại Việt Nam, sẽ phẫu thuật chi tiết từng bộ phận cấu thành nên một hệ thống robot công nghiệp. Từ những ngàm kẹp cơ khí đến khối óc điều khiển trung tâm, mọi chi tiết đều được phân tích dưới góc độ “Hiệu suất máy” – giúp bạn đánh giá và lựa chọn chính xác thiết bị để giải bài toán giảm nhân công, tăng năng suất và loại bỏ hoàn toàn phế phẩm.
Hãy cùng Trung Nguyên TNT tìm hiểu chi tiết về các thành phần chính của loại robot này thông qua bài viết dưới đây.
Một số bộ phận cơ bản cấu tạo nên cánh tay robot
(Nguồn: Adobe stock)
1. Cánh tay robot công nghiệp là gì? Ngữ cảnh tự động hóa trong kỷ nguyên mới
Cánh tay robot công nghiệp (Industrial robotic arm) là một hệ thống thiết bị cơ điện tử đa chức năng, có khả năng lập trình để thực hiện những tác vụ phức tạp trong không gian 3 chiều. Được thiết kế mô phỏng theo cấu trúc sinh học và nguyên lý vận động của cánh tay con người (bao gồm bả vai, cánh tay, khuỷu tay, cổ tay và các ngón tay), hệ thống này vượt trội hơn ở khả năng hoạt động không mệt mỏi, chịu tải trọng lớn và duy trì độ sai số vị trí chỉ ở mức phần nghìn milimet.
Trong các nhà máy sản xuất nhựa truyền thống, việc gắp cuống phế, lấy sản phẩm ra khỏi khuôn ép thường được thực hiện bởi công nhân. Điều này tiềm ẩn ba rủi ro lớn:
- Rủi ro tai nạn lao động: Cong vênh, bỏng nhiệt do thao tác gần khuôn ép ở nhiệt độ lên đến 200°C – 300°C.
- Chu kỳ sản xuất không ổn định: Tốc độ đóng mở khuôn phụ thuộc vào thao tác của con người, dẫn đến năng suất trồi sụt, nhiệt độ khuôn bị thay đổi làm ảnh hưởng chất lượng nhựa.
- Phế phẩm cao: Chỉ một sai lệch nhỏ trong việc lấy sản phẩm có thể làm xước bề mặt sản phẩm PET, PVC cao cấp.
Việc ứng dụng cánh tay robot công nghiệp loại bỏ hoàn toàn các rủi ro trên. Nhờ cấu tạo vững chắc và thuật toán điều khiển thông minh, robot có thể hoàn tất một chu kỳ gắp sản phẩm trong thời gian chưa tới 0.5 giây, đảm bảo 100 vạn chu kỳ đều chính xác như một.
2. Cấu tạo cơ bản của cánh tay robot công nghiệp
Bộ phận cơ khí (Bộ phận cánh tay)
Cơ cấu cơ khí (Mechanical Structure) là “khung xương” của robot, định hình tầm với và khả năng chịu tải. Các bộ phận chính bao gồm:
Khung đế (Base): Nhận nhiệm vụ cố định toàn bộ hệ thống robot vào vị trí làm việc (thường được gắn trực tiếp lên sàn, gắn trên tường hoặc treo ngược trên hệ thống thanh ray của máy ép nhựa). Khung đế được đúc nguyên khối từ gang hoặc thép cường lực, giúp triệt tiêu hoàn toàn rung chấn từ thân robot khi thực hiện các chuyển động lùi/tiến đột ngột với tốc độ 2m/s.
Các khâu liên kết (Links): Tương đương với các đoạn xương trong cánh tay người. Đối với các dòng robot gắp sản phẩm nhựa hiện đại do Trung Nguyên TNT phân phối, các tay dầm (Links) thường được chế tạo từ hợp kim nhôm định hình kết hợp carbon fiber. Vật liệu này mang lại hai lợi ích kinh tế rõ rệt:
- Giảm trọng lượng thân máy, giúp động cơ giảm thiểu điện năng tiêu thụ lên đến 30% khi khởi động.
- Đảm bảo độ cứng vững tuyệt đối, không bị võng hoặc sai lệch tọa độ khi đầu kẹp mang theo tải trọng lớn từ 10kg đến 50kg.
Thông tin sản phẩm
- Thương hiệu: Trung Nguyên TNT Việt Nam
- Nguồn gốc: Chính hãng
- Bảo hành: 1 năm
- Xuất xứ: Trung Quốc
- Đặc điểm: Dòng robot 5 trục 5 servo là dòng robot hiện đại nhất, đáp ứng được hầu hết các yêu cầu khó của sản phẩm, giúp tăng năng suất, tăng lợi nhuận.
Hệ thống khớp nối và số bậc tự do (Joints & DOF)
Nếu các khâu là xương, thì khớp nối chính là “sụn khớp” kết nối cấu trúc lại với nhau, quyết định sự linh hoạt và số bậc tự do (Degrees of Freedom – DOF) của robot.
- Khớp tịnh tiến (Prismatic joint): Cho phép các thanh trượt dọc theo một trục thẳng đứng hoặc nằm ngang. Rất phổ biến trong các cánh tay robot servo 3 trục hoặc 5 trục dùng trong máy ép nhựa.
- Khớp xoay (Revolute joint): Mô phỏng khớp vai hoặc cổ tay người, cho phép cánh tay quay quanh một trục với góc xoay có thể lên tới 360 độ.
Bậc tự do (DOF) ảnh hưởng thế nào đến sản xuất? Số bậc tự do tương đương với số trục chuyển động độc lập.
- Robot 3 trục: Chuyên dùng cho các bài toán gắp – thả (Pick-and-place) đơn giản, tốc độ cực nhanh.
- Robot 6 trục (6-Axis Robot): Sở hữu 6 bậc tự do, cho phép thiết bị đầu cuối tiếp cận một điểm trong không gian từ mọi hướng mọi góc độ. Đây là giải pháp tối ưu cho đánh bóng mặt nhựa, sơn tĩnh điện, hoặc cắt via các chi tiết có hình thù phức tạp.
Lưu ý kỹ thuật khi đầu tư: Không phải lúc nào robot nhiều trục cũng là lựa chọn tốt nhất. Với nhu cầu lấy sản phẩm nhựa thông thường ra khỏi khuôn, hệ thống cánh tay robot Servo 3-5 trục của Đài Loan là đủ để tối ưu chu kỳ. Đầu tư dư thừa số trục không chỉ làm tăng chi phí mua máy từ 40-60% mà còn gây khó khăn trong việc lập trình, tuyển dụng nhân sự vận hành và đội chi phí bảo dưỡng hộp giảm tốc định kỳ.
Thông tin sản phẩm
Hệ thống truyền động (Động cơ Servo và hộp giảm tốc)
Đây là “cơ bắp” của thiết bị, nơi tạo ra lực và mô-men xoắn để dịch chuyển toàn bộ cơ cấu cơ khí nặng hàng trăm kilogam.
Động cơ Servo (Servo Motors): Khác biệt hoàn toàn so với các hệ truyền động khí nén hoặc động cơ biến tần cũ, hầu hết các cánh tay robot tiên tiến hiện nay đều trang bị động cơ AC Servo. Với công nghệ vòng lặp kín (Closed-loop), động cơ Servo có thể theo dõi và tự động bù trừ sai số vị trí theo thời gian thực (nhanh dưới mức mili-giây). Tại Trung Nguyên TNT, các dòng robot đều sử dụng hệ thống động cơ Servo tiêu chuẩn Đài Loan và Nhật Bản, giúp thiết bị:
- Đạt tốc độ khởi động và phanh hãm cực cao, rút ngắn chu kỳ ép từ 1-2 giây mỗi nhịp làm việc. Tính trên quy mô 1 tháng, bạn có thể tăng sản lượng thêm hàng chục nghìn đơn vị sản phẩm mà không cần thêm máy ép.
- Tối ưu điện năng tiêu thụ, giảm ít nhất 40-60% điện năng so với các hệ thống truyền động đời cũ.
Hộp giảm tốc (Reducers): Bộ phận này nằm giữa động cơ và các khâu liên kết, có nhiệm vụ chuyển đổi vòng quay tốc độ cao (nhưng lực yếu) của động cơ thành tốc độ thấp với mô-men xoắn cực lớn. Các hệ thống bánh răng hài (Harmonic drives) hoặc bộ truyền động RV (Rotary Vector) thường được sử dụng nhờ đặc tính không có độ rơ (độ rơ bằng 0), đảm bảo đầu kẹp dừng đúng tọa độ yêu cầu ở mức độ phần nghìn milimet.
Thông tin sản phẩm
Hệ thống điều khiển trung tâm (Tủ điện và HMI)
Bộ điều khiển (Controller) đóng vai trò là “bộ não”, nơi lưu trữ hàng loạt thuật toán nội suy phức tạp và xử lý dữ liệu truyền về từ hàng chục cụm cảm biến.
- Tủ điện và Bộ vi xử lý (CPU/PLC): Nơi tiếp nhận lệnh và truyền tín hiệu xung điều khiển các động cơ. Một hệ thống điều khiển tiêu chuẩn phải duy trì được thời gian phản hồi tín hiệu (Response time) dưới 1ms. Bộ điều khiển chịu trách nhiệm kiểm soát phương hướng, quỹ đạo, gia tốc và lực hãm, đảm bảo robot không bị rung lắc ở cuối hành trình (hiện tượng overshoot).
- Giao diện người-máy (HMI / Teach Pendant): Đây là thiết bị cầm tay cho phép kỹ sư hoặc kỹ thuật viên tương tác trực tiếp, thiết lập tọa độ, cài đặt chương trình gắp chạy theo chuỗi. Với các màn hình HMI hiện đại, việc dạy (teaching) robot được hỗ trợ bởi giao diện trực quan 100% tiếng Việt hoặc tiếng Anh, giúp các nhà máy tự chủ vận hành, thay đổi kích cỡ khuôn và mã hàng nhanh chóng chỉ trong chưa đầy 15 phút.
Hệ thống cảm biến vị trí, lực và thiết bị đầu cuối (End-effector)
Để robot thực sự “chạm” vào sản phẩm, chúng ta cần một công cụ chuyên biệt gắn ở cuối cánh tay.
- Thiết bị đầu cuối (End-effector / Grippers): Tùy theo nguyên công mà bộ kẹp sẽ khác nhau. Đối với ngành nhựa, các thiết bị đầu cuối phổ biến nhất là:
- Ngàm kẹp khí nén (Pneumatic grippers): Lực kẹp mạnh, dùng để gắp và gọt bỏ cuống nhựa cứng.
- Hệ thống giác hút chân không (Vacuum suction cups): Sử dụng bơm chân không để hút nhẹ nhàng màng nhựa, vỏ chai PET, khay định hình hoặc các sản phẩm có bề mặt bóng láng mà không gây trầy xước. Sự kết hợp giữa máy ép nhựa và hệ thống tay gắp chân không là “kim chỉ nam” cho chất lượng sản phẩm xuất khẩu hạng A.
Hệ thống cảm biến (Sensors):
- Encoder (Cảm biến quang encoder): Gắn tại đuôi động cơ, liên tục báo cáo vị trí, tốc độ quay về bộ điều khiển trung tâm.
Cảm biến lực/Mô-men (Force/Torque Sensors): Giúp robot “cảm nhận” được tải trọng. Nhờ cảm biến này, nếu rô bốt gặp vật cản kẹt ở khuôn ép, thay vì cố gắng ép gây vỡ khuôn (chi phí sửa chữa hàng trăm triệu đồng), nó sẽ báo lỗi và dừng tức thời, bảo vệ an toàn cho cả khuôn và máy ép nhựa.
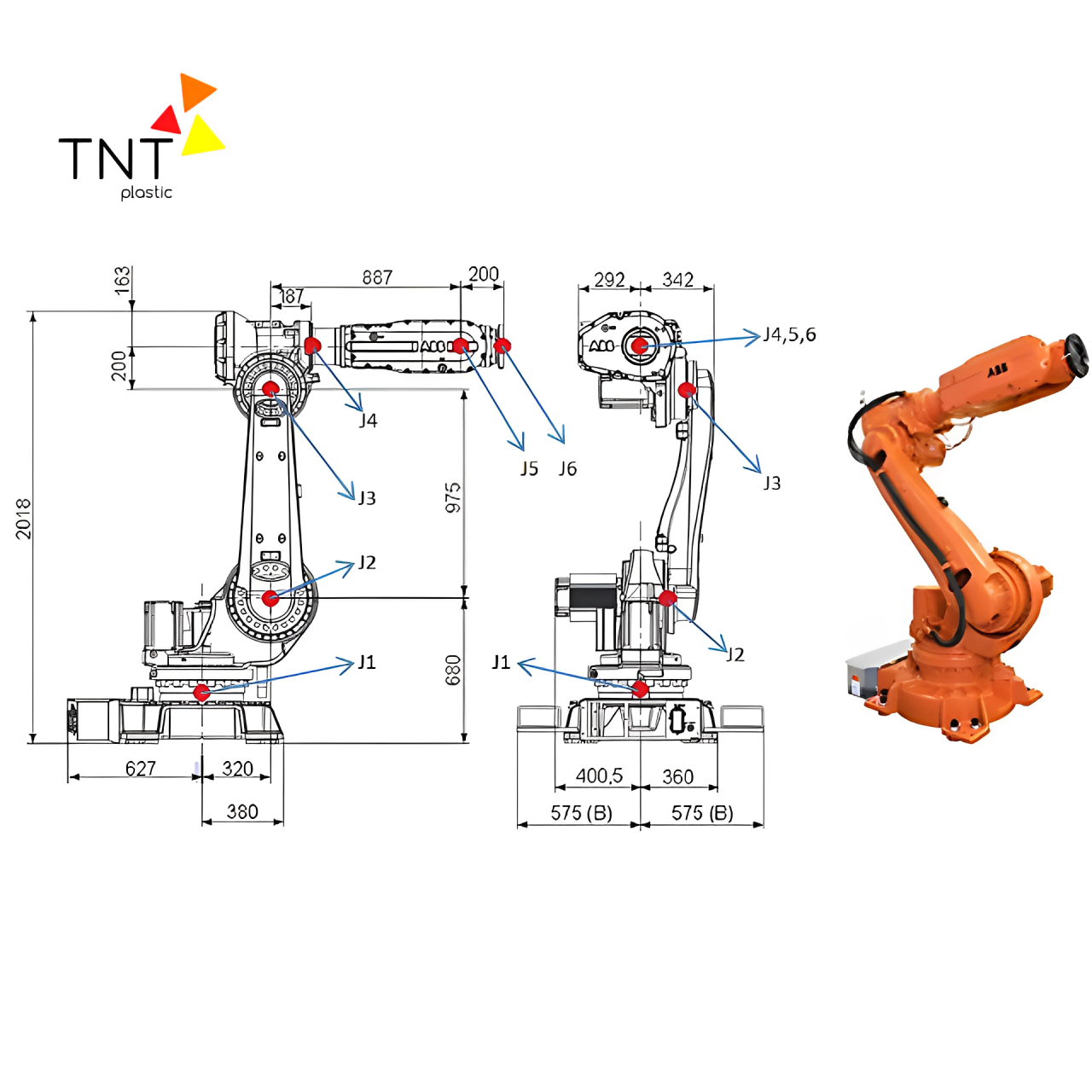
Các thành phần cấu tạo cơ bản của cánh tay robot công nghiệp
(Nguồn: Internet)
3. Đánh giá các thông số kỹ thuật quan trọng khi đầu tư cánh tay robot
Khi chuẩn bị ngân sách đầu tư và lựa chọn giải pháp cấu tạo cánh tay robot phù hợp, bạn cần xem xét 4 thông số kỹ thuật tối quan trọng sau:
- Tải trọng định mức (Payload): Đây là tổng khối lượng tối đa mà cánh tay robot có thể gắp, bao gồm cả trọng lượng của thiết bị đầu cuối (Gripper) cộng với trọng lượng sản phẩm. Đối với ngành ép nhựa, tải trọng phổ biến dao động từ 2kg đến 50kg. Việc chọn sai tải trọng (robot yếu nhưng gắp hàng nặng) sẽ gây quá tải sập thanh dầm, đánh thủng motor Servo từ tháng thứ 3 hoạt động.
- Tầm với và Không gian làm việc (Reach & Workspace): Khoảng cách tối đa từ trục trung tâm của đế robot đến đầu mút cổ tay. Nếu bạn mua một robot có hành trình ngang hẹp hơn khoảng cách từ thân máy ép đến băng tải sản phẩm, robot sẽ không thể thả hàng đến đúng vị trí yêu cầu. Các dòng robot 3-5 trục thường có tùy chọn sải tay (Arm Stroke) và hành trình ngang (Traverse Stroke) rõ ràng dựa trên lực ép (Tonnage) của máy ép nhựa.
- Độ chính xác và độ lặp lại (Positional Accuracy & Repeatability): Sự khác biệt giữa vị trí thực tế của robot và vị trí được lập trình. Trong ứng dụng cắt gọt hay dán nhãn IML lên hộp phôi PET, độ lặp lại sai số chỉ ở mức ±0.02mm là bắt buộc. Hệ thống Servo và kết cấu trục cứng vững quyết định toàn bộ chỉ số này.
- Tốc độ vận hành tối đa (Maximum Speed): Quyết định đến “cycle time” chung. Tốc độ đầu mút di chuyển càng lớn (thường lên đến 2m/s đến 3m/s), năng suất tổng thể càng cao.
4. Đặc điểm nổi bật trong cấu tạo robot công nghiệp ngành nhựa
Cánh tay robot công nghiệp được sử dụng trong ngành công nghiệp nhựa được tạo thành với khả năng chịu nhiệt tốt. Đặc biệt, các khớp nối được thiết kế đặc biệt để có thể chịu được tải trọng lớn và vẫn hoạt động một cách dễ dàng trong điều kiện nhiệt độ cao lên đến 200 độ C của quá trình sản xuất nhựa.
Khả năng chống bụi bẩn và hóa chất
Một đặc điểm quan trọng của cơ cấu cánh tay robot trong ngành công nghiệp nhựa là khả năng chống bụi bẩn và hóa chất:
- Đạt tiêu chuẩn bảo vệ IP67
- Phớt chắn bụi kép tại các khớp
- Lớp phủ chống ăn mòn Nickel-PTFE
Ngoài ra, nhiều model còn tích hợp hệ thống hút bụi để chủ động loại bỏ bụi bẩn, đảm bảo hoạt động ổn định và chính xác.
Cấu tạo của cánh tay robot được thiết kế với khả năng chống hóa chất tốt. Điều này rất quan trọng vì một số loại nhựa có thể chứa hóa chất gây ăn mòn. Các vật liệu chế tạo robot được lựa chọn rất cẩn thận để đảm bảo khả năng chống chịu hóa chất. Bên cạnh đó, bề mặt robot thường được phủ một lớp bảo vệ đặc biệt để tăng cường khả năng chống lại ảnh hưởng của hóa chất trong quá trình sản xuất.
Độ chính xác cao
Để thực hiện các thao tác tinh vi như gắp sản phẩm nhỏ hoặc lắp ráp các chi tiết phức tạp, cánh tay robot được trang bị hệ thống điều khiển tiên tiến với các cảm biến có độ chính xác cao, lặp lại ±0.02mm .
Tốc độ hoạt động cao
Để đáp ứng nhu cầu sản xuất với năng suất cao, robot được thiết kế với hệ thống truyền động mạnh mẽ, sử dụng các động cơ servo có tốc độ đầu mút lên đến 2m/s. Hệ thống điều khiển PID với thời gian phản hồi <1ms.
Thiết kế bền bỉ
Cuối cùng, khả năng làm việc liên tục để đảm bảo sản xuất không bị gián đoạn, robot được thiết kế với độ bền cao với tuổi thọ lên hoạt động > 50.000 giờ. Nhiều model còn tích hợp hệ thống bôi trơn tự động với chu kỳ 10.000 giờ, giúp duy trì hoạt động trơn tru trong thời gian dài mà không cần bảo dưỡng thường xuyên.
Ứng dụng của cánh tay robot trong sản xuất
(Nguồn: Micro)
Để nắm bắt cơ hội phát triển trong thời đại công nghiệp 4.0, việc hiểu biết về cấu tạo của cánh tay robot công nghiệp cơ bản là vô cùng quan trọng. Hy vọng rằng bài viết này đã cung cấp cho bạn một cái nhìn tổng quan và hữu ích về các thành phần chính và ứng dụng của các chi tiết cấu tạo nên cánh tay robot trong sản xuất.
Với hơn 15 năm kinh nghiệm phục vụ trong ngành nhựa, Trung Nguyên TNT Việt Nam cung cấp đa dạng cánh tay robot công nghiệp phụ trợ giúp doanh nghiệp tối ưu các khâu sản xuất trong doanh nghiệp.
Sale miền Nam: 0986403790 (Mr Dương) – 0906769585 (Ms Đào) Sale miền Bắc: 098 210 3223 (Mr Tuấn)MÁY SẴN, GIAO NHANH CHÓNG, GỌI BÁO GIÁ TỐT NHẤT
Theo dõi website Trung Nguyên TNT để cập nhật những thông tin mới nhất về công nghệ robot và các giải pháp tự động hóa tiên tiến.
Bài viết và hình ảnh được tổng hợp bởi Trung Nguyên TNT.
Bài viết liên quan:
- Hỏi Đáp Về Cánh Tay Robot Công Nghiệp Trong Ngành Nhựa
- Tầm Quan Trọng Của Cánh Tay Robot Công Nghiệp Trong Quá Trình Sản Xuất Nhựa
- x2 Hiệu Suất Sản Xuất Với Cánh Tay Robot Công Nghiệp
- Khám Phá Các Loại Cánh Tay Robot Công Nghiệp Ngành Nhựa
CÔNG TY CP TMDV TRUNG NGUYÊN TNT
Nhà cung cấp các giải pháp tăng năng suất, tăng chất lượng, tăng lợi nhuận hàng đầu trong ngành nhựa tại Việt Nam.
- Hotline:
- Sale miền nam: 0986403790 (Mr Dương) - 0906769585 (Ms Đào)
- Sale miền bắc: 098 210 3223 ( Mr Tuấn) - Email: sale@trungnguyentw.com
- Fanpage: Trung Nguyên TNT
- Miền Nam: 439/60 Hồ Học Lãm, Phường An Lạc, TP Hồ Chí Minh
- Miền Bắc: 33 Yết Kiêu, Phường Tân Hưng, TP Hải Phòng
Bài viết liên quan
Tầm Quan Trọng Của Cánh Tay Robot Công Nghiệp Trong Quá Trình Sản Xuất Nhựa
Những năm gần đây, cánh tay robot công nghiệp đã trở nên quen thuộc trong các lĩnh vực sản xuất. Sự xuất hiện của thiết bị này giúp hiệu suất tại các nhà máy tăng đáng kể. Bên cạnh đó, thời gian và chi phí sản xuất cũng được tiết kiệm. Có thể khẳng định, […]
Trung Nguyên TNT • 13/04/2024

Chọn Cánh Tay Robot 3 Trục Hay 5 Trục Cho Nhà Xưởng?
Với xu hướng tự động hóa dây chuyền ép nhựa ngày càng tăng tại Việt Nam, việc tích hợp cánh tay robot đang trở nên ngày càng phổ biến. Những thiết bị này đóng vai trò then chốt trong việc nâng cao năng suất và tối ưu hóa chi phí vận hành, từ đó giảm […]
Trung Nguyên TNT • 28/10/2025

Cánh Tay Robot Thủy Lực Trong Sản Xuất Công Nghiệp
Trong sản xuất công nghiệp hiện đại, cánh tay robot thủy lực đóng vai trò quan trọng trong việc tự động hóa và nâng cao hiệu quả sản xuất. Với cấu tạo cánh tay robot thủy lực gồm các bộ phận như xi lanh, van điều khiển và bơm thủy lực, thiết bị này có […]
Trung Nguyên TNT • 13/11/2024

Hỏi Đáp Về Cánh Tay Robot Công Nghiệp Trong Ngành Nhựa
Cánh tay robot công nghiệp là gì? Đây là một thiết bị tự động được thiết kế để mô phỏng chuyển động của cánh tay con người. Thiết bị này đang ngày càng trở nên phổ biến trong ngành công nghiệp nhựa. Bài viết này sẽ giải đáp những thắc mắc thường gặp về cánh […]

